
Az ipari vezérlőberendezések fejlődésével egyre nagyobb hangsúlyt kap az ár és az energiafogyasztás csökkentése, melynek érdekében a tervezők újabban nagyfrekvenciájú, nagyáramú, szénkefe nélküli egyenáramú (BLDC) motorokat alkalmaznak. Ezek a motorok kulcsfontosságú szerepet játszanak a modern iparban, a háztartási készülékektől a drónokig, megbízhatóságuknak és hatékonyságuknak köszönhetően. A hatékony és biztonságos működésükhöz azonban fejlett vezérlési megoldásokra van szükség, amelyek a félvezető technológia legújabb vívmányait, mint például a MOSFET-eket és IGBT-ket, használják.
A Szénkefe Nélküli Egyenáramú (BLDC) Motorok Alapjai és Vezérlésük
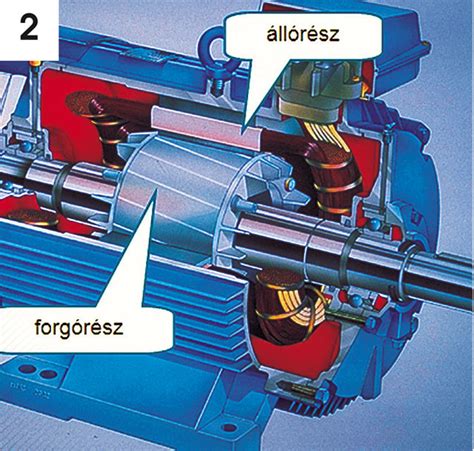
A BLDC motorok jellegzetes, zárt szabályozóhurkú rendszerekben működnek, ahol a forgórész mozgását az állórész tekercseinek gerjesztésével (kommutáció) előállított forgó mágneses tér idézi elő. A forgórész sebessége egyenesen arányos a motor működési frekvenciájával, és az indulóáram, nyomaték, valamint teljesítmény szabályozását az üzemi alapfrekvenciára szuperponált impulzusszélesség-moduláció (PWM) végzi.

A nagyfrekvenciás működés számos előnnyel jár, mint például a brummáram csökkenése, ami a szűréshez szükséges passzív alkatrészek méretének és árának mérséklődését eredményezi. Emellett csökkenti az egyenetlen elektromotoros erőt (EMF), ezáltal mérséklődik a motor rezgése és kopása. Az érzékelővel szabályozott BLDC motoroknál a szabályozóhurok a motor tengelyének forgását figyelő Hall-szenzortól kapott visszacsatolással záródik. Érzékelő nélküli típusok esetén a motor helyzetét az elektromotoros ellenerőből (BEMF) számítják ki. A kefe nélküli szervomotorok, amelyek széles skáláját foglalják magukban az állandó mágneses kefe nélküli egyenáramú motorokat és az állandó mágneses kefe nélküli váltakozó áramú motorokat is, rotációs vagy lineáris mozgásra is tervezhetők. Ezek a motorok az elektronikus kommutációt alkalmazzák a mechanikus kommutátor helyett, amellyel nagyobb hatékonyságot, energiamegtakarítást és jobb vezérlést biztosítanak. A rotor állandó mágneses, nem pedig a rögzített tekercsek.
Teljesítményfélvezető-Meghajtók: MOSFET-ek és IGBT-k
A BLDC motorok tervezésének kulcseleme a meghajtóegység, amely egy teljesítményerősítőként funkcionál. Ez a vezérlőegység kis teljesítményű jelét fogadja, és abból nagyáramú meghajtó bemenőjelet állít elő a magas- és alacsonyoldali, fél H-hídba kapcsolt teljesítmény-IGBT tranzisztorok kapui számára. A BLDC motorok vezérlésében korábban a fémoxid-félvezetős térvezérelt tranzisztorokat (MOSFET-ek) használták, azonban ezeket egyre inkább felváltják a gyorsabb szigetelt kapus bipoláris tranzisztorok (IGBT-k), amelyek gyorsabb kapcsolást és ezáltal nagyobb fajlagos teljesítményt tesznek lehetővé.
Kihívások a Diszkrét Alkatrészekkel Épített Meghajtókban
Bár az IGBT-s meghajtóegységeket diszkrét alkatrészekből is lehet építeni, például bipoláris rétegtranzisztorokat használó totemoszlop-kapcsolású áramkörökkel, ezeknek jelentős hátrányai vannak. Az egyik legfőbb probléma a megfordított fázisú kimenőfeszültség és a kapufeszültségek tranziens fázisai alatt fellépő keresztvezetési áram. Nyitáskor és záráskor az IGBT nagy áramnak és nagy feszültségnek lehet kitéve egyszerre, ami növeli a teljesítményveszteséget, és túlmelegedést vagy maradandó károsodást okozhat.
Tóta W. Árpád, Pethő András, Egri Viktor: sajtó a NER után | Totem Show
A diszkrét megoldások további problémája a szinteltolás hiánya. A digitális teljesítményszabályozás, amelyet ma már főleg a BLDC motorok szabályozására használnak, csak kis kimenőáramot és -feszültséget kínál. A digitális vezérlőegység PWM jele gyakran 3,3 V-os logikai jel, amely nem képes hatékonyan kinyitni az IGBT tranzisztorokat. A szinteltolásra azért van szükség, hogy a vezérlőegységtől kapott PWM jelek alacsony áram- és feszültségszintjét megnöveljék az IGBT működtetéséhez szükséges nagy áram- és feszültségszintű (általában 9-12 V) PWM jelekké. A szükséges védőáramkörök megtervezése is komoly kihívást jelent, és a további alkatrészek növelik a költségeket, a bonyolultságot és a méretet.
Integrált Áramkörös Megoldások: A Jövő Vezérlőegységei
Ezen problémák megoldása érdekében a BLDC motorokhoz tervezett integrált áramkörös, nagyfrekvenciás kapuvezérlők új generációja kombinálja az IGBT-k meghajtásához szükséges puffer- és erősítő áramköröket, és egyúttal védőáramköröket is tartalmaz. Az integrált nagyáramú IGBT-meghajtóegységek egyszerűbb felépítést, rövidebb fejlesztési időt és kisebb méretet kínálnak, emellett kiküszöbölik a diszkrét alkatrészekből épített megoldások minden baját.
Ezek az eszközök minimálisra csökkentik a nagyfrekvenciás kapcsolási zaj hatását azáltal, hogy a nagyáramú meghajtóegység fizikailag közel helyezkedik el a nagy teljesítményű kapcsolóegységhez. Ezáltal csökken a vezérlőegységek teljesítményvesztesége és az azokat érő hőterhelés is. A Rohm Semiconductor BM60212FV-CE2 jelű integrált kapuvezérlője például ideális megoldás az alacsony- és magasoldali IGBT-tranzisztorpár meghajtására. Az eszköz 3,3 V-os és 5 V-os logikai jelekkel is használható, miközben akár 1200 V-os magasoldali lebegő tápfeszültséget és 24 V-os legnagyobb kapuvezérlő feszültséget képes előállítani.
Beépített Védelem: UVLO és DESAT Funkciók
Az IGBT-meghajtóegységek új nemzedéke, mint a BM60212FV-CE2 is, beépített áramkörvédelmet tartalmaz, elsősorban feszültségesés miatti letiltást (UVLO) és telítetté válás elleni védelmet (telítettségvédelem, DESAT).

Feszültségesés Miatti Letiltás (UVLO)
A feszültségesés miatti letiltás hasznos a túlmelegedés és a nyitáskori sérülések elkerüléséhez. Ha nyitáskor túl alacsony a kapufeszültség (MOSFET esetében VGS, IGBT esetében VGE), fennáll annak a veszélye, hogy a tranzisztor gyorsan eléri a telítettségi tartományát, ahol megnő a vezetési és a teljesítményveszteség. A megoldásnak tartalmaznia kell egy UVLO funkciót, hogy addig ne kerüljön feszültség a kapura, amíg a tápegység el nem éri azt a feszültségszintet, amely biztosítja, hogy a MOSFET vagy IGBT gyorsan kinyisson, és így elkerülhető legyen a túlzott teljesítményveszteség. A Texas Instruments UCC27512MDRSTEP jelű IGBT- (és MOSFET-) kapuvezérlője például tartalmaz egy feszültségesés miatti letiltási mechanizmust, amely mindaddig testre zárja a meghajtóegység kimenetét, amíg a tápegység feszültsége el nem éri a tervező által meghatározott UVLO küszöbértéket.
Telítettségvédelem (DESAT)
Az ON Semiconductor NCV5702DR2G jelű eszköze egy jellegzetes IGBT-meghajtóegység telítettségvédő (DESAT) funkcióval. Ez a védőáramkör összehasonlítja az IGBT kollektor-emitter feszültségét (VCE) egy referenciafeszültséggel. Ha az magasabb a referenciafeszültségnél, az IGBT-meghajtóegység lezárja a kimenetét, hogy védje a teljesítménytranzisztort. A korszerű IGBT-k esetében a VCE értékének normál üzemben 3 V körül kell lennie. Ha a VCE ennél jelentősen nagyobb, az valószínűleg túláramot vagy más túlterheléses eseményt jelez, amely károsíthatja az IGBT-t. Nyitáskor egy rövid ideig a VCE értéke jellemzően magas, így annak megakadályozására, hogy a telítettségvédelem túl hamar működésbe lépjen, a referenciafeszültséggel való összehasonlítás egy „résidővel” késleltetve van.
Hatékonyságnövelés és a Miller-hatás Kezelése
A BLDC motor fajlagos teljesítményét részben a hatásfok határozza meg. A nagyobb teljesítményveszteségű BLDC motor jobb hőelvezetést igényel, ami nagyobb hűtőbordákat és ezáltal nagyobb készülékméretet eredményez. A tranzisztorok nyitása idején keletkező veszteségek lehetnek statikusak és dinamikusak. A statikus veszteségeket olyan paraméterek okozzák, mint az eszköz parazita-ellenállása, míg a dinamikus nyitási veszteségekért részben a parazitakapacitás a felelős. A nyitás során a tranzisztor teljesítményvesztesége arányos a tápfeszültséggel, a kapu töltésével (QG) és a kapcsolási frekvenciával.
Tóta W. Árpád, Pethő András, Egri Viktor: sajtó a NER után | Totem Show
A Miller-Kapacitás és a Kapcsolási Veszteségek
Az IGBT kaputöltésének (QG) legfőbb oka a parazitakapacitás, melynek legnagyobb része az úgynevezett Miller-kapacitás. Ez a kapacitás akkor a legjelentősebb, amikor a tranzisztor az úgynevezett Miller-plató területén működik. Ezen a szakaszon a kapufeszültség állandó marad (jellemzően 10 V körül), miközben a kapu vezérlőárama nő vagy csökken - attól függően, hogy az IGBT nyit vagy zár. Ha a meghajtóegység beállítható úgy, hogy nagy meghajtóáramot adjon a Miller-plató területén, az jelentősen csökkentheti a fázis időtartamát, és segíthet csökkenteni a kapcsolási veszteségeket.
Az olyan IGBT-meghajtóegységek, mint az ON Semiconductor NCV5702DR2G és a Rohm Semiconductor BM60212FV-CE2, nagyáramú meghajtással csökkentik a Miller-plató hosszát, és a kapcsolás pontosabb vezérlését teszik lehetővé. A nagyáramú meghajtás kisebb nyitási energiát eredményez (EON) az IGBT nyitásakor, ami segít korlátozni a teljesítményveszteséget. Emellett az IGBT-meghajtóegység kis impedanciájú belső FET-jei miatt létrejövő nagy IGBT-meghajtóáram biztosítja, hogy a meghajtóáramkör teljesítményvesztesége még nagy kapcsolási frekvenciák esetén is főleg a külső soros ellenálláson keletkezik, ennélfogva melegedés tekintetében jobban kézben tartható.
Aktív Miller-Feszültségkorlátozás a Záró Oldali IGBT Védelméért
A Miller-hatás növelheti az alacsonyoldali IGBT kapcsolási veszteségeit is. Ez a probléma akkor jelentkezik, amikor a magasoldali IGBT nyitása feszültséglökést (dv/dt) okoz a zárt alacsonyoldali IGBT kollektorán. A feszültséglökés Miller-áramot indukál a Miller-kapacitáson át az alacsonyoldali IGBT kapukapacitására. Ha a kapu és a test (GND) közötti útvonalon van kritikus impedancia, a Miller-áram a küszöbérték fölé nyomhatja a kapu feszültségét, és az alacsonyoldali IGBT párszor tíz vagy száz ns-ra kinyithat, növelve a kapcsolási veszteségeket.

Ennek elkerülésére az NCV5702DR2G és a BM60212FV-CE2 olyan „aktív Miller-feszültségkorlátozós” védelmet kínálnak, amely összekapcsolja az IGBT kapuját a kapumeghajtó-egység Clamp (feszültségkorlátozó) lábával. Amint a kimenőfeszültség (VO) az aktív Miller-feszültségkorlátozó küszöbértéke (VMC-THR) alá esik, a Clamp láb testre (GND) záródik, és megakadályozza, hogy az IGBT kapuján a feszültség a küszöbérték fölé emelkedjen, és kinyissa az alacsonyoldali IGBT-t.
Háromfázisú Motorok Forgásirányváltása és Vezérlése
A háromfázisú motorok forgásirányváltása és vezérlése kulcsfontosságú ipari alkalmazásokban. A H-híd egy integrált áramkör, amelyet a robotikában és számos más alkalmazásban használnak, hogy állítható teljesítményt adjanak egy terhelésnek, jellemzően egy egyenáramú motornak. Ez egy meglehetősen egyszerű áramkör, amely tranzisztorokból áll, H-szerű elrendezésben, a terheléssel a középpontban. Minden tranzisztor egy-egy flyback diódával van párosítva, amely megakadályozza a tranzisztor károsodását a fordított előfeszítés során. A háromfázisú motorok, például kefe nélküli egyenáramú motorok H-hídjai hasonlóan működnek, mint az egyfázisú motorok H-hídjai, de egy további tranzisztorpárral rendelkeznek. A hat tranzisztorral az áram bármely irányban szabályozható a három motortekercsben.
Biztonságtechnikai Szempontok a Vezérlőáramkörökben
Egy érdekes és gyakran felmerülő kérdés a vezérlőáramkörök táplálása, különösen 3x400/230V-os hálózatok esetén. Sok esetben, különösen német gyakorlatban, transzformátort használnak a 230V-os vezérlőkör táplálására, még akkor is, ha az L1 és N között rendelkezésre áll a 230V. Ennek oka a biztonság. A hálózati tápfeszültség zárlati áram képessége több kA lehet, ami veszélyes lehet a vezérlőelemekre (nyomógombok, relé érintkezők), amelyek kis zárlati áram elviselésére alkalmasak. Egy kis teljesítményű transzformátor szekunder oldalán nem tud létrejönni jelentős, több kA zárlati áram, így egy esetleges vezérlőköri zárlatnál kicsi az esélye, hogy beégjen például egy relé érintkező. A gyakran előforduló feszültségszintek vezérlésekhez 48V, 24V AC, míg a PLC rendszerekben a 24V DC feszültség terjedt el. Fontos megjegyezni, hogy a transzformátor szekunder oldali "N" pontja akkor nulla, ha földelve van (PE-re kötve), különben csak a vezérlési közös pont.
Mezőorientált Szabályozás (FOC)
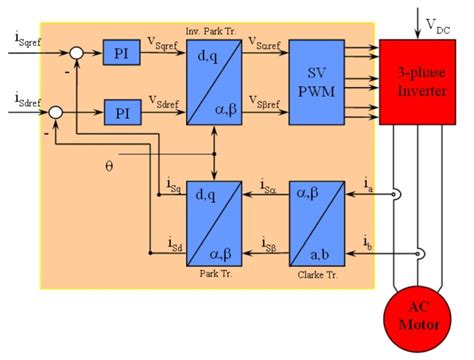
A FOC (Field Oriented Control) célja, hogy a szinkron és aszinkron motoroknál külön tudjuk szabályozni a nyomatékot szolgáltató és a mágneses fluxus elemeit, ezzel függetlenítve őket. A felbontott mágneses és nyomaték fluxusokkal független nyomatékszabályozást hozhatunk létre. A felbontáshoz szükséges matematikai műveleteket a mikrokontroller végzi el. A nyomaték akkor maximális, ha az állórész és a forgórész mágneses tere egymásra merőleges. Ha ezt a feltételt folyamatosan fenn tudjuk tartani a fluxus megfelelő orientációjával, akkor csökkenthetjük a nyomaték lüktetését.
A FOC során az állórész áramát egy vektorral reprezentáljuk. Ehhez a háromfázisú idő és sebesség függő rendszert egy kétkoordinátájú (d, és q) idő független rendszerré kell transzformálnunk. A FOC szabályozott motoroknak két referenciára van szüksége: a nyomaték referencia (q-val reprezentálva), és a fluxus referencia (d-vel reprezentálva). A Clarke transzformációnál egy másik referencia keretet veszünk fel két egymásra merőleges α,β tengellyel, ahol α és a iránya megegyező. A Park transzformáció során a merőleges α,β koordináta rendszert d,q forgó koordináta rendszerbe alakítjuk. Ha figyelembe vesszük, hogy a rotor fluxus egybeesik a d tengellyel, akkor az áramvektor pillanatnyi állapotát is ábrázolhatjuk.
A rotor pozíciója a FOC szabályozáshoz elengedhetetlen információ. Szinkron gépeknél a rotor sebessége megegyezik a rotor fluxus sebességével, és a rotor pozíciója is megegyezik a fluxus pozíciójával. Aszinkron gépeknél a rotor sebessége nem egyezik meg a rotor fluxus sebességével, így a rotor pozíció sem azonos a rotor fluxus pozícióval. Aszinkron gépek esetében általában az áramok méréséből kapott értékekkel számítják ki a rotor pozícióját, ami jóval pontatlanabb érték, mint a szinkron gépeknél. A szinkron gépek pozícióját mérhetjük enkóderrel.
Háromfázisú Végfok Fejlesztése
Egy háromfázisú végfok alapvetően rendelkezik egy egyenirányítóval a DC busz előállításához (egy vagy háromfázisú egyenirányító), egy háromfázisú inverterrel az AC és PMSM motorok szinusz, illetve a BLDC motorok trapéz feszültségének előállításához különböző frekvenciákon, és egy mikrokontrollerrel a mezőorientált számítások elvégzése miatt. Visszacsatolásként mérhetjük az áramot, a fázisok feszültségértékeit, a sebességet, pozíciót.
A fejlesztési folyamat során számos kihívás merülhet fel, például az elektromos zavarok miatti processzor-reset, vagy a félhidak rövidre zárásának lehetősége, ami az IGBT modul károsodásához vezethet. Az ilyen problémák kiküszöbölésére hardveres megoldásokat, például in/sd bemenetű FET drivereket alkalmaznak, amelyek egy PWM bemenetet és egy engedélyező jelet kapnak. A vezérlő elektronika és a teljesítmény elektronika közös földjének problémáját az optocsatolók alkalmazása oldja meg, amelyek minden jelet galvanikusan leválasztanak. További fontos kiegészítés a fék ellenállás, amely a motor generátoros üzeme esetén visszatöltött energiát képes elnyelni, hogy a DC busz feszültsége ne emelkedhessen túl magasra.
Tóta W. Árpád, Pethő András, Egri Viktor: sajtó a NER után | Totem Show
A modul tervezése során fontos a félhidaknál az alsó és felső FET-ek kapcsolási idejének hangolása, az optoleválasztások pontossága, sebessége, a sönt ellenállások, a FET-ek, drivere, a fék ellenállás, az egyenirányító, a DC tápok, biztosíték méretezése, és a számítási kapacitás optimális megválasztása. A Texas által ajánlott 32 bites 60 MHz-es TMS320F28035 processzor ideális választás lehet a feladatra, különösen, hogy a gyártó opensource mezőorientált motor control könyvtárat is kiadott.
Nyomtatott Áramkör Tervezése
A kapcsolási rajz hosszas tervezése után a nyomtatott áramkör routolása még nagyobb figyelmet igényel a teljesítmények, zavarvédettség, földek, tápok és a nagyfrekvenciás analóg, illetve digitális jelek miatt. Célszerű a vezérlő elektronika és a teljesítmény elektronika külön nyomtatott áramkörön való elhelyezése. A vezérlő elektronikán található a DSP, annak tápellátása, debugger ledek, processzor specifikus konfiguráló jumperek, Jtag csatlakozó és az oszcillátor. A DSP analóg modulja kaphat alsó és felső mérési referenciát kívülről, illetve a nyomtatott áramkörről analóg földet és 3,3 V-os tápot szintén referenciaként. A processzor alatt közvetlenül földfólia helyezkedik el, a nyomtatott áramkör másik oldalán pedig tápfólia. A két fólia között minden táplábnál 100 nF-os hidegítő kondenzátort helyeznek el.

A teljesítmény elektronika nyomtatott áramkörén helyezkedik el a vezérlő elektronika csatlakozóinak párja. A vezérlő elektronika tápja 24 V DC-ből stabilizálódik, és látja el táppal az USB-Uart átalakítót, a CAN kommunikációt, a control kártyát, és az optoleválasztások vezérlő elektronikai oldalát. A végfok fogad enkóder és Hall jeleket, méri a DC busz és a fázisok feszültségét, valamint áramát. A rendszer teljesítmény tápja 230 V AC egy biztosíték után fojtótekercsen, valamint egyenirányítón halad át. A FET driverek és egyéb periféria áramkörök tápellátását egy kisméretű transzformátor biztosítja, így a rendszernek csak 24 V DC és 230 V AC tápot kell adni. Található a rendszerben még fék ellenállás, a hozzá tartozó analóg komparátoros áramkör és ventilátor. A teljesítmény elektronika nyomtatott áramkörének tervezése során figyelni kell az egyes részegységek izolálására. A nyomtatott áramkör egyik végén kapott helyet a DC-busz és a többi teljesítmény táp, illetve teljesítmény elektronikai elem. Középen helyezkedik el a háromfázisú inverter, a másik végén pedig a vezérlő elektronika.
Motorfékezés és Biztonsági Megfontolások

Ahol a tengely továbbforgása veszélyes lehet az ember vagy a berendezés számára, ott fékes motorok alkalmazása célszerű. Jellemző ez a probléma az emelést végző berendezéseknél és a haladó hajtásoknál, például daruknál. A rugós feszítésű fék az egyenáramú elektromágneses tér kialakulásakor enged ki, és a feszültség megszűnésével a beépített rugók szorítóerejénél fogva fékez. Az egyenáramú fékhez szükséges áramot a motor kapocsdobozában elhelyezett egyenirányító állítja elő.
Fékrendszerek Frekvenciaváltóval
A hagyományos mágneskapcsolós motorindításnál a motortekerccsel párhuzamosan kötött fék megoldás hátránya, hogy a motort indító mágneskapcsoló elejtésekor a még teljes sebességgel forgó motor rövid ideig generátor üzemben áramot fejleszt, ami átmenetileg megtáplálja a féktekercset, és ez késlelteti a fék reakcióját megálláskor. Ezt úgy lehet elkerülni, hogy a féktekercset a motort indító mágneskapcsolóval kapcsoljuk, de külön érintkezővel.
Az az általánosan használt megoldás, hogy az egyenirányító híd a motorfázisokról vagy az egyik motorfázisról és a csillagpontról kap táplálást, nem alkalmazható frekvenciaváltóra kapcsolt motornál, mert alacsony sebességnél a motor alacsony feszültséget kap, ezért a fékre jutó feszültség is a névleges alatti lesz, így a féktekercs nem tudja kioldani a féket. További problémát okozhat, hogy a frekvenciaváltó kapcsoló üzeme miatt az egyenirányítóra nagyfrekvenciájú, 500V-os impulzusok jutnak, ami tönkreteheti azt.
Tóta W. Árpád, Pethő András, Egri Viktor: sajtó a NER után | Totem Show
A frekvenciaváltóknál a fékezés nem magával az ellenállással történik, hanem a kimenő feszültség és áramviszonyok megfelelő kialakításával. A fékellenállás a visszatáplált energia elfűtésére szolgál. Fontos, hogy a fékellenállás kellően szigetelt legyen, és kibírja a közel 600V-os feszültségszintet.
Motorbekötés és Pólusszám
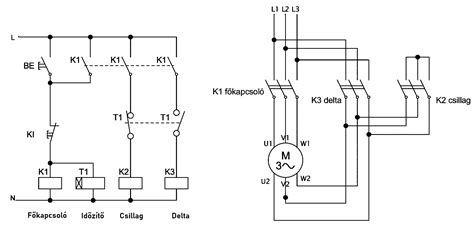
A villanymotorok bekötésének módjai, a feszültség és a forgási irány függvényében többféleképpen lehet bekötni az egy- és háromfázisú villanymotorokat. Mivel ez gyártónként eltérő lehet, ezért a villanymotor tekercseinek védelmének érdekében nagyon fontos, hogy az adott villanymotor adattábla jelölései, értékei ellenőrizve legyenek. Háromfázisú motor csillagba kötése esetén nem kell a nulla. Ez egyetlen fogyasztó. Ekkor 3x230V-ot vár a motor. Delta esetén egy-egy tekercs van két-két fázis között. Egyfázisú frekvenciaváltó 230V-ot egyenirányít, a belső 325VDC feszültségből állít újra elő 3x230V feszültséget.
Ahogy nő a pólusszám, csökken az ugyanazon a frekvenciához tartozó fordulat. Ha csökken a fordulat, de a teljesítmény állandó, akkor a nyomatéknak nőnie kell. Tehát a nagyobb pólusszámú motor nyomatéke lesz nagyobb.
Biztonsági Intézkedések és Szabványok
A vezérlőrendszerek tervezésénél kiemelten fontos a biztonságtechnikai szabványok betartása. Komplex rendszerek, mint például egy fűrészgép előtolásának vezérlése, ma már csak biztonságtechnikai relékkel építhetők fel. Ezek a relék biztosítják, hogy a gép csak akkor működjön, ha minden biztonsági feltétel (pl. zárt védőburkolat, kétkezes indítás) teljesül. A bemenetre kerülő motor és a kimenetre kerülő három fázis helytelen bekötése gyakori hiba, ami könnyen tönkreteheti a frekvenciaváltót. Fontos, hogy a munkát hozzáértő személy végezze.
tags: #haromfazisu #motor #vezerles #fetekkel