Elgondolkodott már azon, hogy miért van az, hogy az elektromos motorok többsége sosem éri el pontosan azt a fordulatszámot, amire a hálózati frekvencia és a motor felépítése alapján számítanánk? Vagy miért van az, hogy bizonyos motorok hajszálpontosan tartják ezt az elméleti értéket, míg mások mindig alatta maradnak? Az elektromos motorok működésének megértéséhez elengedhetetlen a szinkron fordulatszám ismerete. Ez az elméleti fordulatszám adja meg azt a referenciaértéket, amelyhez képest a motorok tényleges működését vizsgálhatjuk. Nem csupán egy elvont fizikai mennyiség, hanem egy olyan kulcsfontosságú paraméter, amely meghatározza az elektromos gépek tervezését, kiválasztását és üzemeltetését. Ez a cikk részletesen bemutatja a szinkron fordulatszám fogalmát, számítását, valamint annak jelentőségét az elektromos motorok, generátorok és az energiaellátó hálózat működésében.
Az Elektromos Motorok Működésének Alapjai
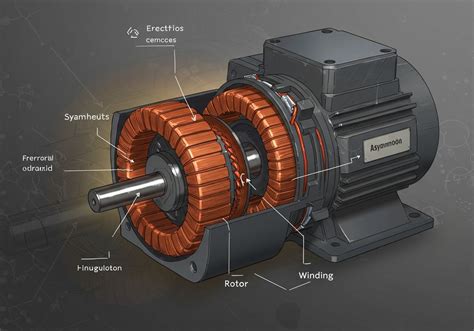
Mielőtt belemerülnénk a szinkron fordulatszám rejtelmeibe, tekintsük át röviden az elektromos motorok működésének alapjait. Egy elektromos motor lényegében elektromos energiát alakít át mechanikai energiává, vagyis forgó mozgássá. A váltakozó áramú motorok szíve a forgó mágneses mező. Ezt a mezőt a motor állórészében, azaz a sztátorban elhelyezett tekercsek hozzák létre. Amikor a sztátor tekercseit háromfázisú váltakozó árammal tápláljuk, a tekercsekben folyó áram fáziseltolódása miatt egy olyan mágneses mező jön létre, amely folyamatosan forog a sztátorban.
Képzeljünk el egy egyszerű kétpólusú motort. A sztátor tekercsei úgy vannak elrendezve, hogy egy északi és egy déli pólust hoznak létre. Ahogy a váltakozó áram folyik, ezek a pólusok folyamatosan helyet cserélnek, látszólag körbejárva a sztátor belső kerületén. A mágneses mező forgásának sebessége két fő tényezőtől függ: a tápláló hálózat frekvenciájától és a motor pólusainak számától. Minél nagyobb a frekvencia, annál gyorsabban változik az áram iránya, és annál gyorsabban forog a mágneses mező. A forgó mágneses tér indukcióvonalai metszik az állórész tekercselését és a lemezelt forgórész hornyaiban elhelyezett vezetékeket is. Az indukcióvonal-metszés következtében az álló- és forgórészben feszültség indukálódik.
Az elektromotorok elődje, a villámdelejes forgony, amit Jedlik Ányos készített 1825-ben, egyenárammal működött. Az ő alapötlete az volt, hogy ha árammal átjárt tekercs (állórész - sztátor) által gerjesztett mágneses térbe egy másik árammal átjárt tekercset helyez, amelynek mágneses polaritása azonos, mint az első tekercsé, akkor azokra erő hat. Ha a második tekercset egy tengelyre helyezi, akkor a létrejövő erő forgatónyomatékot képez és a könnyen forgó tengelyen a tekercs elfordul (forgórész - rotor). Az egyenáramú motoroknál az áram irányát rendszeresen meg kell fordítani a forgórész tekercsében, erre a kommutátor, vagy osztott csúszógyűrű használható.
Az elektromos motor működése és részei
A Szinkron Fordulatszám Definíciója és Kiszámítása
Mi is pontosan a szinkron fordulatszám? Definíció szerint a szinkron fordulatszám (ns) az a sebesség, amellyel a váltakozó áramú motor sztátorában létrejövő mágneses mező forog. Ez az elméleti fordulatszám, amelyet a hálózati frekvencia és a motor pólusainak száma határoz meg. A szinkron fordulatszám a motor „célsebessége” a mágneses mező szempontjából. Ha egy motor szinkron fordulatszámon működik, az azt jelenti, hogy a rotorja (a forgó része) pontosan ugyanazzal a sebességgel forog, mint a sztátorban lévő mágneses mező.
A szinkron fordulatszám kiszámítása egy viszonylag egyszerű képlettel történik, amely két alapvető paramétertől függ: a hálózati frekvenciától és a motor pólusainak számától.
A képlet a következő:
ns = (120 * f) / P
Ahol:
- ns: Ez a szinkron fordulatszám, mértékegysége fordulat per perc (RPM).
- f: Ez a hálózati frekvencia, mértékegysége Hertz (Hz). Ez az a frekvencia, amellyel a váltakozó áram a motor tekercseibe jut. Európában, így Magyarországon is, az ipari és lakossági hálózat szabványos frekvenciája 50 Hz. Észak-Amerikában és más régiókban 60 Hz a szabvány.
- P: Ez a motor pólusainak száma. Fontos megjegyezni, hogy a motorok mindig páros számú pólussal rendelkeznek (2, 4, 6, 8 stb.), mivel a mágneses mezőnek mindig van északi és déli pólusa. A pólusok száma határozza meg, hogy egy adott frekvencia mellett milyen gyorsan foroghat a mágneses mező.
Miért 120?
- Percre való konverzió: A frekvencia Hertzben (ciklus per másodperc) van megadva, míg a fordulatszámot percenkénti fordulatban (RPM) szeretnénk megkapni. Egy perc 60 másodperc, tehát a 60-as szorzó innen ered.
- Póluspárok: A képletben a pólusok száma (P) szerepel, de a mágneses mező forgása valójában a póluspárok számától függ. Egy póluspár két pólusból áll (északi és déli). Tehát, ha van P számú pólusunk, akkor P/2 póluspárunk van. Másképp megfogalmazva, a mágneses mező egy teljes fordulatot tesz meg minden egyes póluspár esetében, minden egyes frekvencia ciklus alatt. Ha a képletet póluspárok (p) számával írnánk fel, akkor így nézne ki: ns = (60 * f) / p. Mivel P = 2 * p, ebből következik, hogy p = P / 2. Ezt behelyettesítve az eredeti képletbe kapjuk, hogy ns = (60 * f) / (P/2), ami megegyezik a ns = (120 * f) / P képlettel.
Ez a táblázat jól mutatja, hogy a pólusok számának növelésével a szinkron fordulatszám csökken. Ez a jelenség kulcsfontosságú a motorok tervezésében, hiszen a mérnökök a kívánt fordulatszám eléréséhez a megfelelő pólusszámú motort választhatják ki.
| Pólusok száma (P) | Szinkron fordulatszám (50 Hz) (RPM) | Szinkron fordulatszám (60 Hz) (RPM) |
|---|---|---|
| 2 | 3000 | 3600 |
| 4 | 1500 | 1800 |
| 6 | 1000 | 1200 |
| 8 | 750 | 900 |
A Motor Pólusainak Száma és Befolyása
A motor pólusszáma az egyik legfontosabb paraméter, amely közvetlenül befolyásolja a szinkron fordulatszámot. Egy elektromos motor sztátorában elhelyezett tekercsek úgy vannak kialakítva, hogy amikor áram folyik rajtuk, mágneses pólusokat (északi és déli) hoznak létre. A „pólusok száma” arra utal, hogy hány ilyen mágneses pólus keletkezik egy adott pillanatban a sztátor kerületén.
Példák pólusok számának jelentőségére:
- 2-pólusú motor: Egy adott pillanatban egy északi és egy déli pólus jön létre.
- Magasabb pólusszám (pl. 8-pólusú): Több pólus keletkezik, ami lassabb szinkron fordulatszámot eredményez.
Minél több pólusa van egy motornak, annál több „mágneses hullám” forog a sztátorban egy adott időpillanatban. Ez azt jelenti, hogy a mágneses mezőnek hosszabb utat kell megtennie egy teljes fordulat megtételéhez, vagyis lassabban forog. Ezt a jelenséget a képlet is alátámasztja: a pólusok száma (P) a nevezőben van, tehát fordítottan arányos a szinkron fordulatszámmal.
A pólusszám megválasztása kritikus a motor tervezésénél és alkalmazásánál. Egy adott hálózati frekvencia mellett a pólusszám határozza meg a lehetséges szinkron fordulatszámokat. Ezért látunk a legtöbb ipari és háztartási motor adattábláján olyan fordulatszámokat, amelyek közel vannak a fent említett szinkron fordulatszámokhoz (pl. 1450 RPM, 2900 RPM).
- Magasabb pólusszám (pl. 6 vagy 8 pólusú): Alacsonyabb szinkron fordulatszámot eredményez, ami nagyobb nyomatékot és lassabb működést tesz lehetővé. Ez ideális olyan alkalmazásokhoz, amelyek nagy terhelést igényelnek alacsony sebességnél (pl. daruk, keverők).
- Alacsonyabb pólusszám (pl. 2 vagy 4 pólusú): Magasabb szinkron fordulatszámot eredményez, ami nagyobb sebességet tesz lehetővé, de általában kisebb indítónyomatékkal jár. Ezt gyakran használják szivattyúkban, ventilátorokban és egyéb olyan berendezésekben, ahol a gyors működés a fontos.
A pólusszám tehát nem csupán egy technikai adat, hanem egy tervezési döntés, amely alapvetően befolyásolja a motor működési jellemzőit és azt, hogy milyen feladatokra alkalmas.
Szinkron Motorok: Állandó Fordulatszám a Mágneses Mezővel
A szinkron motorok, mint a nevük is sugallja, szinkronban működnek a sztátor forgó mágneses mezőjével. Ez azt jelenti, hogy a rotorjuk pontosan ugyanazzal a sebességgel forog, mint a mágneses mező, tehát a motor fordulatszáma megegyezik a szinkron fordulatszámmal (ns).
A szinkron motorok felépítése:
- Sztátor: Ez a motor álló része, amely a tekercseket tartalmazza. Felépítése megegyezik az aszinkron motorok állórészének felépítésével.
- Rotor: Ez a motor forgó része. A szinkron motorok rotorja nem egyszerűen indukcióval gerjesztődik, hanem saját, állandó mágneses mezővel rendelkezik.
- Gerjesztett rotor (tekercselt rotor): Ez a hagyományos szinkron motorok esetében jellemző. A rotoron tekercsek vannak elhelyezve, amelyeket egyenárammal (DC) táplálnak, általában kefék és csúszógyűrűk segítségével.
- Állandó mágneses rotor (PMSM - Permanent Magnet Synchronous Motor): A modernebb szinkron motorok gyakran állandó mágneseket használnak a rotoron, így nincs szükség külső gerjesztő áramra és kefékre.
Működési elv: A sztátor forgó mágneses mezője „magával húzza” a rotor állandó mágneses pólusait. Mivel a rotor pólusai „rögzítve” vannak a sztátor mezőjéhez, a rotor pontosan ugyanazzal a sebességgel forog, mint a sztátor mágneses mezője, azaz a szinkron fordulatszámon.
Jellemzők és kihívások:
- Állandó fordulatszám: A legfőbb előny, hogy a terhelés változásától függetlenül pontosan a szinkron fordulatszámon forognak. Ezért ideálisak olyan alkalmazásokhoz, ahol a pontos sebességszabályozás elengedhetetlen (pl. precíziós gépek, szerszámgépek).
- Indítási nehézségek: A hagyományos szinkron motorok nem önindítóak. Mivel a rotor kezdetben áll, a sztátor forgó mágneses mezője gyorsan változik körülötte, és a rotor nem tud „felkapaszkodni” a szinkron sebességre. Különböző indítási módszerekre van szükség (pl. indító segédgéppel, frekvenciaváltóval, vagy a pólussarukba épített indító kalicka segítségével). A kalickákkal aszinkron módra közel szinkron fordulatszámra gyorsul a forgórész. Ezután a forgórész tekercselés egyenáramú gerjesztésével megjelenik a szinkronizáló nyomaték és a gép „beugrik” a szinkronba.
- Generátoros üzem: A szinkron gépeket az esetek többségében generátoros üzemben használják az erőművekben, ahol a villamos energiát állítják elő. A gép fordulatszáma és frekvenciája közötti szoros kapcsolat miatt (f = p n) csak kitüntetett fordulatszámon képes tartósan üzemelni.
Aszinkron Motorok: A Csúszás Jelensége
Az elektromos motorok világában a szinkron motorok mellett az aszinkron (vagy indukciós) motorok a legelterjedtebbek. Ezek a motorok alkotják az ipari hajtások gerincét, és a legtöbb háztartási készülékben is megtalálhatók. Fő jellemzőjük, hogy nem érik el a szinkron fordulatszámot, hanem mindig valamivel lassabban forognak.
Működési elv: Az aszinkron motorok működési elve az elektromágneses indukción alapul. A sztátorban lévő forgó mágneses mező, amely a szinkron fordulatszámon forog, a rotorban feszültséget indukál. A probléma az, hogy az indukcióhoz szükség van egy relatív mozgásra a forgó mágneses mező és a rotor között. Ha a rotor pontosan a szinkron fordulatszámon forogna, akkor nem lenne relatív mozgás, nem indukálódna feszültség, nem folyna áram a rotorban, és nem jönne létre a rotor mágneses mezője. Ezért az aszinkron motornak mindig egy kicsit lassabban kell forognia, mint a sztátor mágneses mezője. Ez a sebességkülönbség biztosítja a folyamatos indukciót és ezáltal a nyomatékot. A forgórészben indukált feszültség hatására a forgórész vezetékeiben áram indul meg, amely az állórész mágneses mezőjével kölcsönhatásba lépve nyomatékot létesít, ami megforgatja a rotort. A forgórész áramának frekvenciája az állórész frekvenciájának szlipszerese.
A csúszás (slip): A csúszás (s) az aszinkron motorok egyik legfontosabb jellemzője. Azt fejezi ki, hogy a rotor fordulatszáma (nr) mennyivel marad el a szinkron fordulatszámtól (ns).
A csúszás képlete: s = (ns - nr) / ns
- Példa: Egy 4-pólusú, 50 Hz-es hálózatról üzemeltetett aszinkron motor szinkron fordulatszáma 1500 RPM. Ha a rotor 1450 RPM-mel forog, akkor a csúszás s = (1500 - 1450) / 1500 = 50 / 1500 = 0.0333, vagyis 3,33%.
- A csúszás értéke jellemzően 1% és 6% között mozog, terheléstől függően. Terheletlen állapotban a csúszás nagyon alacsony, közel zéró, így a motor fordulatszáma megközelíti a szinkron fordulatszámot. A motor terhelésének növelése tehát a fordulatszám csökkenésével és a hálózati áramfelvétel növekedésével jár.
Aszinkron motorok típusai:
- Kalickás forgórészű (squirrel cage) motor: Ez a legelterjedtebb típus. A rotor rudakból áll, amelyeket a két végén rövidre záró gyűrűk kötnek össze. Ez a szerkezet hasonlít egy mókuskerékre, innen az elnevezés.
- Csúszógyűrűs forgórészű (wound rotor) motor: Ennél a típusnál a rotoron tekercsek vannak, amelyeket külső ellenállásokhoz lehet csatlakoztatni csúszógyűrűk és kefék segítségével.
Előnyök és hátrányok:
- Egyszerű felépítés és robusztusság: Az aszinkron motorok egyszerűbbek és olcsóbbak a szinkron motoroknál, és kevesebb karbantartást igényelnek (különösen a kalickás forgórészű változatok).
- Változó fordulatszám: A terhelés változásával a fordulatszám is változik (a csúszás miatt), ami bizonyos alkalmazásoknál hátrány lehet.
Fordulatszám-szabályozás Frekvenciaváltók Segítségével
A szinkron fordulatszám képlete (ns = (120 * f) / P) világosan megmutatja, hogy a motor fordulatszámát két fő paraméter befolyásolja: a hálózati frekvencia (f) és a pólusok száma (P). Míg a pólusszám a motor fizikai tulajdonsága, és nem változtatható meg működés közben, addig a frekvencia szabályozható. A frekvenciaváltók forradalmasították az elektromos motorok vezérlését, lehetővé téve a motorok fordulatszámának precíz és fokozatmentes szabályozását.
A frekvenciaváltó működése:
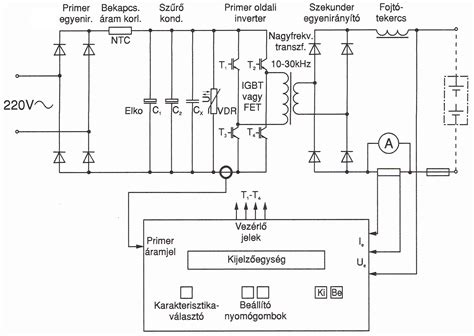
A frekvenciaváltó (gyakran inverternek is nevezik) három fő részből áll:
- Egyenirányító: A bejövő váltakozó áramot (AC) egyenárammá (DC) alakítja.
- DC busz: Energiatárolóként működik, kisimítja az egyenáramot.
- Inverter: Az egyenáramot visszaalakítja változtatható frekvenciájú és feszültségű váltakozó árammá (AC), amelyet a motorhoz vezet.
Az inverter nemcsak a frekvenciát változtatja, hanem a motorra kapcsolt feszültséget is. Ez azért fontos, mert a motor mágneses fluxusának fenntartásához a feszültség és a frekvencia arányát (U/f arány) nagyjából állandónak kell tartani. Ha csak a frekvenciát csökkentenénk, a feszültség változatlanul hagyásával a mágneses fluxus megnőne, ami a motor telítődéséhez és túlmelegedéséhez vezetne.
A frekvenciaváltók előnyei:
- Precíz sebességszabályozás: Lehetővé teszik a motor fordulatszámának pontos beállítását az alkalmazási igényeknek megfelelően.
- Energiahatékonyság: Különösen a centrifugális terhelések (ventilátorok, szivattyúk) esetében jelentős energiamegtakarítás érhető el. Az U/f arány szabályozásával optimalizálható a motor működése, csökkentve a veszteségeket.
- Lágy indítás és leállítás: Megakadályozzák a hirtelen áramlökéseket és mechanikai igénybevételeket, ezzel növelve a motor és a hajtott berendezés élettartamát.
- Nyomatékszabályozás: A modernebb frekvenciaváltók komplex algoritmusokat használnak a nyomaték pontos szabályozására is, ami kritikus lehet bizonyos ipari folyamatokban.
A frekvenciaváltók lehetővé teszik a mérnökök és üzemeltetők számára, hogy a motorokat a legoptimálisabb ponton üzemeltessék, maximalizálva az energiahatékonyságot és a folyamatvezérlés pontosságát.
A Szinkron Fordulatszám Jelentősége az Energiaellátó Hálózatban
Az elektromos motorok mellett a szinkron fordulatszám fogalma még nagyobb, rendszerszintű jelentőséggel bír az energiaellátó hálózatban. A világ villamosenergia-hálózatának gerincét nagyrészt szinkron generátorok alkotják. Ezek a generátorok (pl. erőművek turbinái által hajtott generátorok) pontosan a szinkron fordulatszámon forognak, hogy a hálózati frekvenciát (50 Hz vagy 60 Hz) fenntartsák.
Szinkron generátorok működése:
A generátor rotorja egyenárammal gerjesztett elektromágneses pólusokkal rendelkezik, és egy külső mechanikai erő (pl. gőzturbina, vízturbina, gázturbina) forgatja. A rotor mágneses mezője metszi a sztátor tekercseit, feszültséget indukálva bennük. Ennek értelmében, ha egy 4-pólusú generátor 1500 RPM-mel forog, akkor (1500 * 4) / 120 = 50 Hz frekvenciát állít elő.A szinkron generátor felépítését tekintve nem sokban különbözik az aszinkronmotortól. Lemezelt állórészük hornyaiban általában háromfázisú tekercselés van. Forgórészük egyenárammal gerjesztett póluskerék, amely tömör vagy lemezelt vasból készül. Lehet hengeres vagy kiálló pólusú. Hengeres forgórész esetén a gerjesztő tekercseket hornyokban helyezik el.
A hálózati frekvencia stabilitása:
A hálózati frekvencia stabilitása létfontosságú az egész villamosenergia-rendszer működése szempontjából.
- Elektromos berendezések károsodása: Sok berendezés (motorok, transzformátorok) a névleges frekvenciára van tervezve. A frekvencia eltérése súlyos károkat okozhat ezekben a berendezésekben, vagy rontja azok hatékonyságát.
- Rendszerösszeomlás: Jelentős frekvenciaingadozások esetén a védelmi rendszerek lekapcsolhatják a generátorokat, ami dominóeffektust indíthat el, és regionális vagy országos áramszünethez vezethet.
A hálózati frekvencia folyamatosan változik a termelés és a fogyasztás egyensúlyának függvényében. Ha a fogyasztás nagyobb, mint a termelés, a frekvencia csökken, mivel a generátorok lassulni kezdenek. Ha a termelés nagyobb, mint a fogyasztás, a frekvencia növekszik, mivel a generátorok gyorsulnak. A rendszerirányítók feladata, hogy ezt az egyensúlyt folyamatosan fenntartsák, a generátorok teljesítményének szabályozásával. Ez a folyamatos finomhangolás biztosítja, hogy a hálózati frekvencia a nagyon szűk tűréshatáron belül maradjon (pl. 50 Hz ± 0,1 Hz).
A megújuló energiaforrások (nap, szél) térnyerésével a hálózati frekvencia stabilitásának fenntartása új kihívásokat támaszt. A szél- és naperőművek invertereken keresztül csatlakoznak a hálózathoz, és nem rendelkeznek a hagyományos szinkron generátorok „tehetetlenségével” (inerciájával), amely segít stabilizálni a frekvenciát. Az okos hálózatok (smart grid) fejlesztése során a szinkron gépek és a frekvenciaváltók által vezérelt motorok közötti interakció is egyre fontosabbá válik.
Fordulatszám Mérése és Ellenőrzése
Az elektromos motorok, generátorok és hajtásrendszerek hatékony és biztonságos működéséhez elengedhetetlen a fordulatszám pontos mérése és ellenőrzése. Bár a szinkron fordulatszám egy elméleti érték, a motor tényleges, vagyis rotor fordulatszámának (nr) monitorozása kritikus fontosságú. A mért rotor fordulatszám (nr) összehasonlítása a kiszámított szinkron fordulatszámmal (ns) segít meghatározni a csúszást és értékelni a motor teljesítményét.
A fordulatszám mérésére szolgáló leggyakoribb eszközök:
- Mechanikus tachométerek: Ezek a régebbi típusú eszközök közvetlenül érintkeznek a forgó tengellyel, és mechanikai áttételek vagy centrifugális erők segítségével mérik a fordulatszámot.
- Optikai tachométerek: Ezek a leggyakrabban használt kézi eszközök. Egy lézersugarat bocsátanak ki a forgó felületre, amelyre egy fényvisszaverő csíkot ragasztottak. A visszavert fény impulzusait érzékeli az eszköz, és a pulzusok frekvenciájából számítja ki a fordulatszámot.
- Stroboszkópok: Nem közvetlenül mérik a fordulatszámot, hanem vizuális ellenőrzésre szolgálnak. Egy villogó fényforrás frekvenciáját úgy állítják be, hogy az megegyezzen a forgó tárgy fordulatszámával. Ekkor a tárgy állónak tűnik, lehetővé téve a részletek megfigyelését.
- Mágneses/induktív szenzorok: Ezek a szenzorok a forgó tengelyre rögzített fogaskerék vagy mágneses jelölések elhaladását érzékelik, és minden egyes elhaladáskor impulzust generálnak. Az impulzusok számából és idejéből a vezérlőrendszer pontosan kiszámítja a fordulatszámot.
- Hall-effektus szenzorok: Hasonlóan a mágneses szenzorokhoz, ezek is a mágneses mező változását érzékelik, amikor egy mágneses jelölés elhalad előttük.
- Encoder-ek (jeladók): Rendkívül pontos eszközök, amelyek optikai vagy mágneses elven működve nagyon finom felbontásban képesek érzékelni a tengely elfordulását. Abszolút vagy inkrementális értékeket szolgáltatnak, és nemcsak fordulatszámot, hanem pozíciót és irányt is mérnek.
Szenzorok és aktuátorok: A mechatronika határfelülete
A szenzorokat és az aktuátorokat nem véletlenül szokás együtt tárgyalni. Ennek sok egyéb mellett, két oka van. Az egyik az, hogy néhány un. aktív szenzor inverz üzemmódban aktuátorként viselkedik. A másik az, hogy a két csoport a mechatronika „klasszikus” definícióját gyakran önmagában is megjeleníteni képes. Az aktuátorok és a szenzorok képezik a „határfelületet” a gépészet és az elektrotechnika/elektronika között, hiszen a szenzor feladata a mérendő fizikai (mechanikai) mennyiségekből villamos úton mérhető mennyiséget létrehozni, míg az aktuátor villamos bemenő jel (teljesítmény) segítségével hatni képes a mechanikai rendszerben zajló folyamatokra. Ezek a rendszer építőelemek tehát a legtöbb esetben elektromechanikus rendszerek, és ráadásul az intelligens szenzorok és aktuátorok esetében az elektronika is integrálva van hozzájuk (Embedded Systems: beágyazott rendszerek). A teljesség kedvéért azonban tudni kell, hogy nem minden szenzor és aktuátor feltétlenül elektromechanikus rendszer. Vannak különleges eszközök, amelyek egymagukban szenzorok és aktuátorok.
Példák szenzorokra:
- Nyúlásmérő bélyeg: Fémréteg vagy félvezető alapú passzív szenzor, amely alakváltozást (nyúlást, zsugorodást) mér. Minden olyan fizikai mennyiség mérésére alkalmas, amelyek egy megfelelően méretezett gépészeti elemen reprodukálható módon, és a tervezett mérési tartományban alakváltozást képesek létrehozni.
- Piezoelektromos gyorsulásérzékelő: Aktív szenzor, amely alakváltozást alakít át villamos töltéskülönbséggé. Alkalmas erő, nyomás és gyorsulás mérésére. A szeizmikus tömeg gyorsulással arányos tömegerőt hoz létre, amely erő a kerámiát deformáló rugóerővel tart egyensúlyt. Fontos tudni, hogy ez az eszköz statikus mérésekre napjainkig még nem alkalmas, mert az alakváltozás (kristály deformáció) hatására létrejövő töltések idővel elszivárognak.

Szinkronizálás a Filmiparban: Egy Másfajta Szinkron
Bár az elektromos motorok szinkron fordulatszámáról szól a cikk, érdemes kitérni egy másik, hasonló elnevezésű, de teljesen eltérő jelentésű fogalomra is: a filmek szinkronizálására. Ez a folyamat a szinkronrendezés által valósul meg, amely az idegen nyelvű filmek magyar változatának elvi, szellemi és művészeti irányítását jelenti.
A szinkronrendező feladatai:
- Elvi irányítás: A szinkronrendező hatás- és felelősségi körébe tartozik a megalkuvásoktól mentes, vagy legfeljebb az ésszerűség határain belül maradó kompromisszumokkal terhelt, az eredetivel minimum azonos értékű akusztikus produkció létrehozása.
- Szellemi irányítás: A szinkronprodukcióban közreműködő valamennyi munkatárs közül a szinkronrendezőnek van a legnagyobb rálátása az adott film egészére, részleteire, a jelenetezés kapcsolódási pontjaira; ő tudja, melyik akcióra mi lesz a reakció, ő tervezi meg, hogy a színészi játék honnan induljon, és hova fusson ki. Jelenti azt is, hogy a film témáját illetően a szinkronrendező bír a legmélyebb műveltséggel és tárgyi tudással.
- Művészeti irányítás: Ez a legvitatottabb pont. Sokan úgy vélik, hogy a szinkronizálás célja csupán az eredeti tartalom reprodukálása, míg mások szerint hozzáadhat egy plusz értéket, egyedi hangulatot, ami csak az adott nyelvű közönség számára élvezhető.
Művészet vagy szakmunka?
Jogi értelemben a szinkronrendező nem művész, nem illeti jogdíj a szinkronizált filmek után, ugyanakkor a szerzői jogvédelem egyes elemeit, mint például a névfeltüntetés jogát, rá nézve is alkalmazhatónak ítélte a jogalkotói karitativitás.A művészi kvalitás megítélése szempontjából azonban más a helyzet. A szinkronizálás valódi célja lehet-e több, mint fogyaszthatóvá tenni nyelveket nem beszélő tömegek számára a bábeli filmtorony morzsáit? Sokak szerint igen. Gondoljunk a klasszikus magyar szinkronokra, mint a "Frédi és Béni" vagy a "Minden lében két kanál", amelyekben a magyar színészek hozzáadott értéket teremtettek az eredetihez. Karinthy Micimackó-ja is sokkal jobban cseng, mint a Vini maci kalandjai. Ha a szinkronizálás célja ez a plusz érték adása, akkor a szinkronrendezés bizony szerteágazó szakértelemet követelő művészet.
Szereposztás és hangszerelés:
A szinkronrendező egyik legfontosabb feladata a szereposztás. Ez alapvetően befolyásolja a szinkron sikerét. A legelmélyültebb módszer az elemző módszer, amely során a rendező tüzetesen átvizsgálja a színész játékát, minden gesztust, hangsúlyt, szemvillanást, majd műveltségének, habitusának, egyéni értékrendszerének megfelelő kontextusba helyezi őket. Ezt követően alakít ki egy egységes hangképet, figyelembe véve a színészek hangi adottságait, hajlíthatóságát és „sávszélességét”. Ez a fajta hangszerelés biztosítja, hogy a különféle hangok harmonikus összhangot alkossanak, elkerülve az összetéveszthetőséget és a monotóniát.
A magyar fordítások gyakran tréfásak, viccesek, vagy éppen figyelemfelkeltőek. Előfordul, hogy a magyar fordítók a film valamelyik jelenetét kiragadva új címet adnak az alkotásnak, vagy alcímmel egészítik ki az eredetit. A szinkronizálásnál a fordításnak, a színészi játéknak és a hangnak is jónak kell lennie. Ráadásul a szó szerinti fordítás lehetetlen az angol tömörsége vagy éppen a szájmozgások miatt. Ez már inkább műfordítás. Emellett szinkronizált filmeknél kevés, ha tartalmilag helyes a fordítás, a szövegnek stílusában, hangulatában, nyelvhasználatában is tükröznie kell az eredetileg mondottakat. Ez viszont komoly feladat, tudásra, hozzáértésre van szükség.
Az elektromos motor működése és részei
Karbantartás és Javíthatóság
Az elektromos gépek, legyenek azok szinkron- vagy aszinkron motorok, rendszeres karbantartást igényelnek az optimális működés és hosszú élettartam biztosítása érdekében.
Aszinkron motorok karbantartása:
Az aszinkron motorok szakszerű üzemeltetés esetén ritkán hibásodnak meg. A leggyakoribb hibák mechanikai jellegűek, főleg csapágyazásra vezethetők vissza. Emiatt javításuk általában kevésbé eszközigényes, viszont a ritkábban előforduló, de komolyabb meghibásodások megfelelően gépesített szakműhelyt igényelnek. A legegyszerűbb mechanikai meghibásodások elhárítása során is különös figyelemmel kell lenni a villamos részek épségének megóvására, az alapvető villamos méréseket (szigetelési szilárdság, üresjárási, rövidzárási mérés stb.) ez esetben is el kell végezni. A kisebb teljesítményű, kalickás forgórészű gépek esetében a villamos meghibásodásokat legtöbbször az állórész tekercselés szigetelési állapotának leromlása, menet- ill. testzárlata jelenti. Ezeknek a hibáknak a javításához gyakran elegendő egy alapos tisztítás, szárítás és egy gondosan elvégzett regeneráló impregnálás. A zárlati meghibásodások szinte minden esetben újratekercseléssel szüntethetők meg. A nagyobb teljesítményű 0,4 kV-os indukciós gépek forgórészei többnyire tekercseltek, csúszógyűrűkkel rendelkeznek, amely újabb meghibásodási lehetőséget jelent. A forgórészek meghibásodásait leggyakrabban a tengelyvégek, csapágyhelyek, tekercselés, csúszógyűrűk sérülései jelentik. Ezen hibák javítása már nagyobb szakértelmet és komoly felszereltségű szakműhelyt igényel.
Szinkron generátorok karbantartása:
A villamos iparban az egyik legdrágább berendezés a generátor, ezért ezeket kell a leginkább óvni a különböző védelmi berendezésekkel. Karbantartása nagy szakértelmet igényel, különös tekintettel az erőművi generátorok esetére. Házilag a kisebb generátorok sem javíthatók, a beavatkozások jól felszerelt szakműhelyt igényelnek.
A szinkron- és aszinkron gépek egyaránt működhetnek generátoros és motoros üzemben is. Azonban a gyakorlat szerint a szinkronmotort üzemeltetik generátorként, az aszinkrongépet pedig motorként.